 Станки дома
Станки дома Балансировочные станки купить по низкой цене с доставкой по всей россии и снг | станочный мир
Балансировочные станки
Балансировочные станки представлены на нашем сайте в широком ассортименте, который позволит Вам выбрать и купить оборудование наиболее оптимальное по цене и функционально подходящее для решения новых задач, поставленных на Вашем производстве, или для смены оборудования для балансировки валов и роторов, эксплуатация которого на Вашем предприятии становится нецелесообразной, вследствие морального или физического износа.
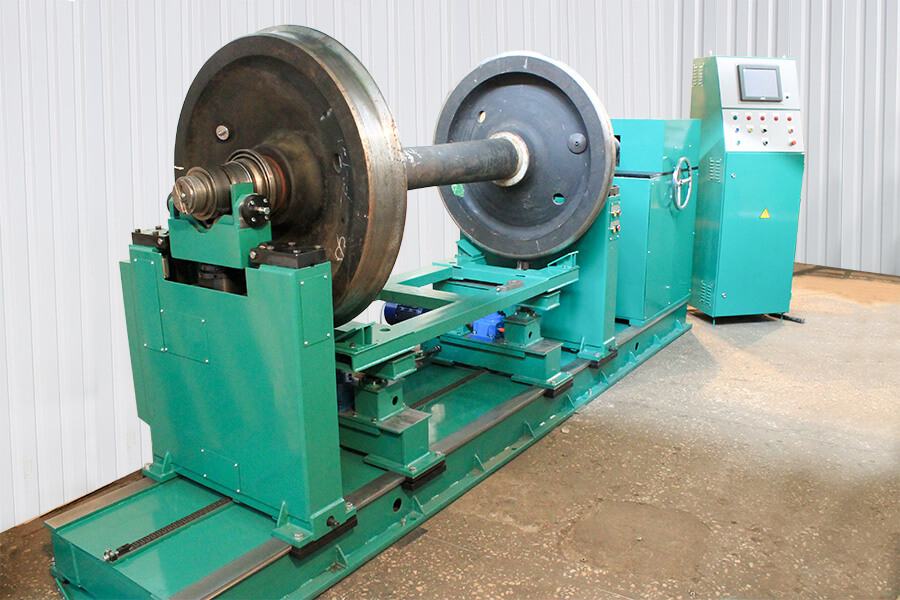
Балансировочный станок, балансировочная машина — измерительный прибор, определяющий место и степень статической или динамической неуравновешенности вращающихся деталей машин. Некоторые станки имеют приспособления для автоматической корректировки масс.

Балансировочный станок используется в процессе балансировки вращающихся деталей различных машин — роторов электродвигателей и турбин, валов, муфт, винтов, гироскопов и т.д. Также балансируют патроны фрезерных станков, это позволяет снизить вибрацию, и что даже более важно предотвратить поломку шпинделя, связанную с дисбалансом на больших скоростях.
Станок, как правило, состоит из одной или двух опор, в которые помещается балансируемое изделие, привода для его вращения и измерительного устройства с индикацией. В процессе тестирования при вращении изделия датчиками регистрируется вибрация (виброскорость, виброперемещение или виброускорение) либо давление (в зависимости от типа станка). Данные, полученные таким образом, позволяют определить место и степень неуравновешенности детали.
Жёсткие и мягкие опоры
Различают балансировочные станки с жёсткими (дорезонансные) и мягкими (зарезонансные) опорами. Названия не совсем точно отражают суть процесса. Балансировка с жесткими опорами производится на частоте, ниже собственных колебаний системы, с мягкими — выше частоты собственных колебаний. Оба способа имеют свои недостатки и преимущества, но первый способ является более универсальным, в то время, как для балансировки с мягкими опорами станок создается специально под балансируемую деталь, но и результаты выдает более точные. Основа балансировочного станка — датчик скорости опоры, который может, например, работать на принципе магнитной индукции (может использоваться и акселерометр), и датчик угла поворота балансируемой детали. Имея эти исходные данные, а также число оборотов детали, можно вычислить, какую массу и в каком месте надо убрать или добавить.
Методы балансировки
Экспериментальная установка для лазерной балансировки гироскопов ДНГ и РВГ. Вакуумная камера с установленным гироскопом ДНГ.
Существует три основных метода балансировки деталей:
- Удаление массы — в нужных местах удаляют массу путём сверления, фрезерования или другим способом (вплоть до лазерной гравировки), для перераспределения массы. Наиболее простой способ.
- Добавление массы — в нужных местах добавляют массу путём наваривания пластин, установки балансировочных шайб, регулировочными винтами или другими способами.
- Метод балансировочных колец — применяется в основном к оправкам фрезерных станков. На оправке при этом крепятся два кольца имеющих на наружной поверхности эксцентриковую форму. Они могут вращаться вокруг оси оправки и фиксируются винтом. Таким образом каждое кольцо создает дисбаланс, который компенсирует собственный дисбаланс оправки и инструмента. Кольца могут быть съемными или не съемными. Наиболее прогрессивный метод для фрезерной обработки. Недостатком является необходимость использования специальных и как правило дорогих оправок.
Также для высокоточной балансировки специальных роторов, таких как гироскопы, используют метод лазерной коррекции дисбаланса.
В компании Станочный Мир Вы можете купить балансировочные станки отечественных или зарубежных производителей по выгодным ценам. Наиболее подходящий вариант при необходимости Вам смогут подобрать специалисты нашего отдела продаж.
§
Если Вам необходимо купить Вертикальный балансировочный станок В-8 звоните по телефонам:
в Москве 7 (499) 372-31-73
в Санкт-Петербурге 7 (812) 245-28-87
в Минске 375 (17) 276-70-09
в Екатеринбурге 7 (343) 289-16-76
в Новосибирске 7 (383) 284-08-84
в Челябинске 7 (351) 951-00-26
в Тюмени 7 (3452) 514-886
в Нижнем Новгороде 7 (831) 218-06-78
в Самаре 7 (846) 201-07-64
в Перми 7 (342) 207-43-05
в Ростове-на-Дону 7 (863) 310-03-86
в Воронеже 7 (473) 202-33-64
в Красноярске 7 (391) 216-42-04
в Нур-Султане 7 (7172) 69-62-30;
в Абакане, Альметьевске, Архангельске, Астрахани, Барнауле, Белгороде, Благовещенске, Брянске, Владивостоке, Владимире, Волгограде, Вологде, Иваново, Ижевске, Иркутске, Йошкар-Оле, Казани, Калуге, Кемерово, Кирове, Краснодаре, Красноярске, Кургане, Курске, Кызыле, Липецке, Магадане, Магнитогорске, Майкопе, Мурманске, Набережных Челнах, Нижнекамске, Великом Новгороде, Новокузнецке, Новороссийске, Новом Уренгое, Норильске, Омске, Орле, Оренбурге, Пензе, Перми, Петрозаводске, Пскове, Рязани, Саранске, Саратове, Севастополе, Симферополе, Смоленске, Сыктывкаре, Тамбове, Твери, Томске, Туле, Улан-Удэ, Ульяновске, Уфе, Хабаровске, Чебоксарах, Чите, Элисте, Якутске, Ярославле и в других городах
По всей России бесплатный номер 8 (800) 775-16-64.
В странах СНГ — Беларуси, Казахстане, Туркменистане, Узбекистане, Украине, Таджикистане, Молдове, Азербайджане, Кыргызстане, Армении в городах Нур-Султан, Бишкек, Баку, Ереван, Минск, Ашхабад, Кишинев, Душанбе, Ташкент, Киев и других для покупки оборудования типа Вертикальный балансировочный станок В-8 звоните на любой удобный номер, указанный на нашем сайте, или оставьте свои контакты под кнопкой ЗАКАЗАТЬ ЗВОНОК вверху сайта — мы сами Вам перезвоним.
Балансировочный стенд своими руками на отладочной плате silabs c8051f120-tb
Если вы задумали отбалансировать что-то вращающееся, будь то колесо, винт самолета или летающая тарелка. Или Вам интересна история, как проходят рабочие будни программиста. Увлекательная история по созданию балансировочного стенда…
Предисловие.
Выражаю благодарность моему руководителю Дмитриеву Ивану Алексеевичу, инженеру конструктору Арапову Андрею, инженерам электронщикам Тураеву Александру и Гидалю Григорьевичу. Этот стенд результат работы сплаченной команды.
Начну с пред истории: Работаю я программистом в организации
Совершенно не секретно, но к делу не относится, скажу лишь, что занимаемся БПЛА
, где периодически появляется множество разных интересных задач, и появилась у нас необходимость провести балансировку высокой точности винта самолета. Оборудование для такой балансировки как оказалось можно купить, но стоить это будет очень дорого, решили сделать сами.
Немного расскажу зачем это понадобилось. Наш самолет, с этим винтом, ужасно колбасило на холостых оборотах(800 об/мин). Обычно балансируют такие штуки, статически и динамически. Статическая балансировка заключается в уравновешивании относительно центра вращения, без вращения, а динамическая это уравновешивание во время вращения.
Что касается статической балансировки, то тут все понятно винт просто уравновешивается относительно центра вращения, а вот что делать с динамической балансировкой, когда при вращении винт начинает создавать вибрацию.
Для такой задачи был построен
, состоящий из рамы прикрепленной на пружинках к массивному основанию.
На массивном основании установлен электродвигатель, и через шкив он вращает ось, на которую установлен балансируемый винт. Еще на раме установлены акселерометры, а на ось с винтом датчик холла. Электродвигатель подключен к частотнику, который управляет частотой его вращения.
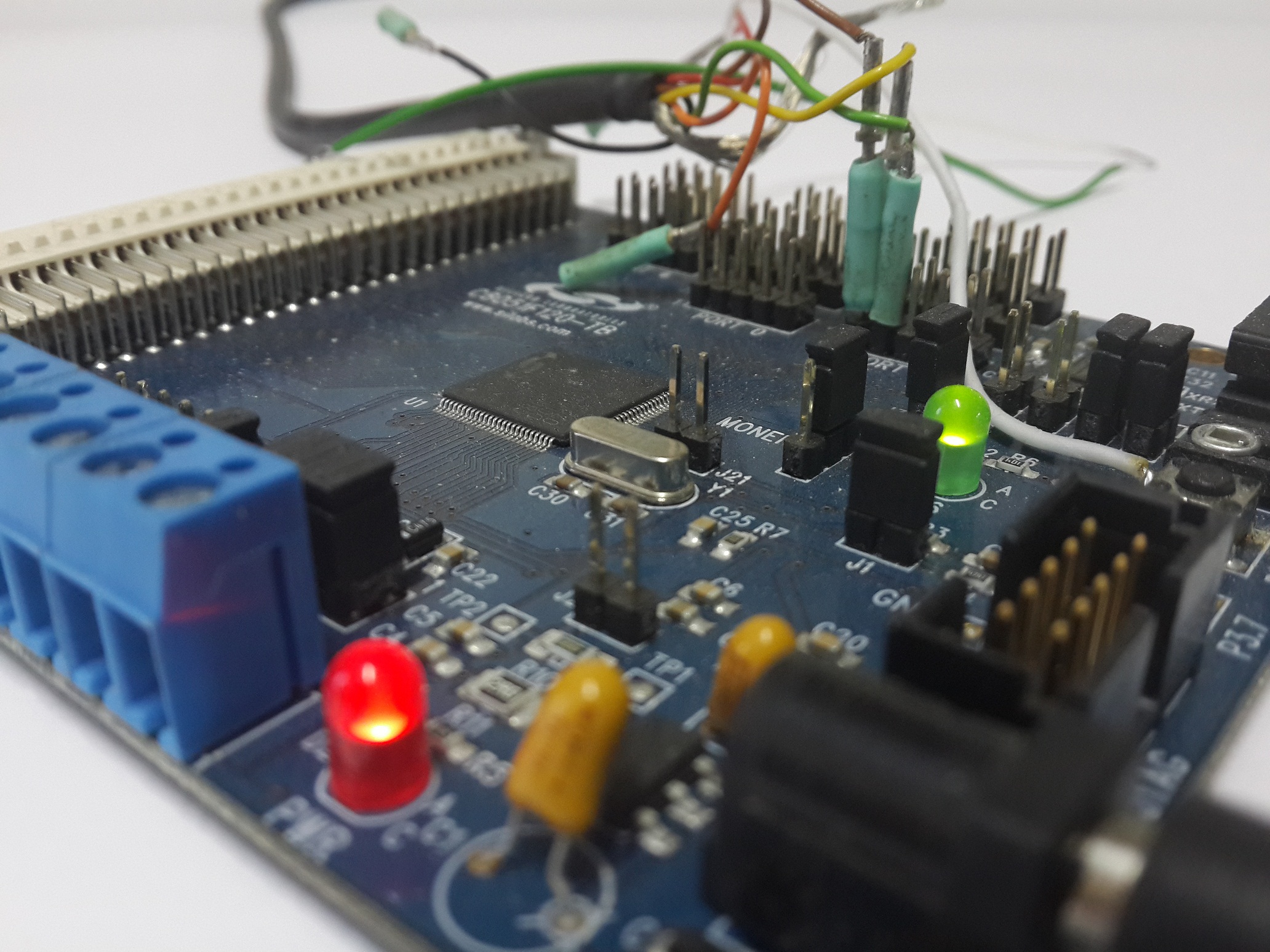
В качестве измерителя отклонения был использован акселерометр на две оси, через усилитель подключенный на
АЦП
отладочной платы SiLabs C8051F120-TB. Чтобы отловить момент прохождения вращающегося тела через 0 градусов, был поставлен датчик холла, сигнал с которого подавался еще на одну ножку отладочной платы.
Итак мы получили нехитрый агрегат,
который может измерить ускорение рамы с телом вращения, и подать сигнал о прохождении через 0 градусов вала, вращающего балансируемый винт.
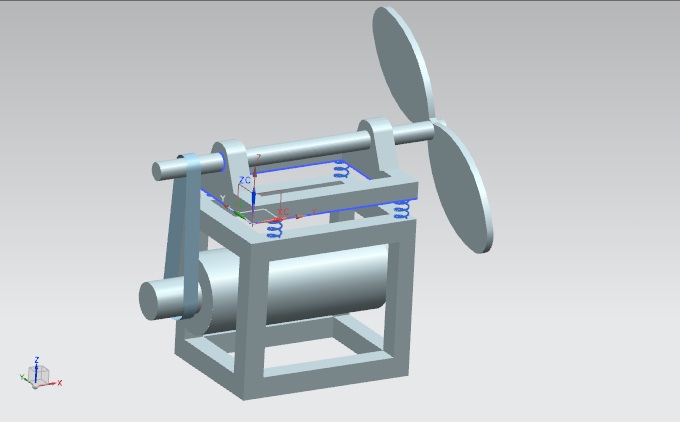
/внешний вид нехитрого девайса/
Мне дали эту конструкцию, и поставили задачу программным путем узнать, какое необходимо количество изоленты , кусочков пластилинаили аракала очень точно взвешенных грузов, прилепить на краешек лопасти винта, для того, чтобы он стал отбалансированным. И сделать приложение с удобным и понятным интерфейсом, чтобы за 5 минут можно было разобраться как ею пользоваться.
Сначала я подумал, что управлюсь за один день, и задача очень простая. Но при снятии сигнала осциллографом, обнаружилось, что вибрация всей установки, помехи от электросети, и прочий шум, превращают снятый сигнал с АЦП в равномерный непонятный шум. Хотя если приглядеться, то проглядывается явный периодический максимум и минимум. На отладку программной части и железа ушло около недели, или даже чуть больше, зато потом точность девайса стала радовать глаз.
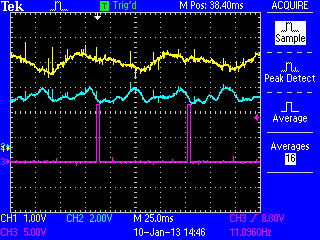
/Показания осцилографа/
На отладочную плату я написал программку, которая снимает показания, и посылает их на COM порт.
Конфигурируем контроллер, определяем основные переменные, выделяем массивы и константы. Готовим отладочную плату к программированию.
#include "c8051f120.h"
#define SYSCLK 98000000 //частота на которой запустили контроллер
#define BAUDRATEU0 57600 // частота Uart0 для передачи по RS232 на COM порт
#define SAMPLE_RATE 24500000 // Sample frequency in Hz
#define INT_DEC 256
#define SAR_CLK 12250000 // Частота АЦП
#define FREQT0 (748*2) //частота Таймера 0
#define BUFADCSIZE 512 //BUFADC
sfr16 ADC0 = 0xbe; // ADC0 data
sfr16 RCAP2 = 0xca; // Timer2 capture/reload
sfr16 RCAP3 = 0xca; // Timer3 capture/reload
sfr16 TMR2 = 0xcc; // Timer2
sfr16 TMR3 = 0xcc; // Timer3
bit ProcessFlag = 0, ADCFlag = 0, flFree = 1, flNewADC = 0; //флаги
xdata unsigned int BufADC[BUFADCSIZE], ADCcount = 0, RTC = 0, RTCP = 0, int_dec = INT_DEC, tmpA = 0, lastTmp = 0;
xdata float Propeller = 0.0, tmp_float;
xdata long accumulator = 0L;
#define RESETTICK (1496)
sbit LED = P1^6; //светодиод для проверки работы датчика холла
sbit BUTTON = P3^7; //кнопка
//UART0 буферы и флаги для передачи
#define NBFM 50
xdata unsigned char BuferFromModem [NBFM];
xdata unsigned char wBFM, rBFM, marBFM;
#define SIZE_BUFFER0 50
xdata char BufferInModem[SIZE_BUFFER0];
xdata int r0, rk;
bit flTransmiter;
//-----функции загрузки в буфер вывода для абстракции протокола обмена
void OutModem1(unsigned char Data, char i)
{
BufferInModem[i] = Data | 0x80;
}
//------------------------------------------------------------------------------
void OutModem2(unsigned int Data, char i)
{
BufferInModem[i] = (Data & 0x007f)| 0x80;
BufferInModem[i 1] = ((Data & 0x3f80) >> 7)| 0x80;
}
//------------------------------------------------------------------------------
void OutModem4(unsigned long int Data, char i)
{
BufferInModem[i] = (Data & 0x0000007f)| 0x80;
BufferInModem[i 1] = ((Data & 0x3f80) >> 7) | 0x80;
BufferInModem[i 2] = ((Data & 0x1fc000) >> 14) | 0x80;
BufferInModem[i 3] = ((Data & 0xfe00000)>> 21) | 0x80;
}
//---- конфигурирование частоты на которой будем работать
void OSCILLATOR_Init (void)
{
int loop;
char SFRPAGE_SAVE = SFRPAGE;
SFRPAGE = CONFIG_PAGE;
OSCICN = 0x83;
CLKSEL = 0x00;
SFRPAGE = CONFIG_PAGE;
PLL0CN = 0x00;
SFRPAGE = LEGACY_PAGE;
FLSCL = 0x10;
SFRPAGE = CONFIG_PAGE;
PLL0CN |= 0x01;
PLL0DIV = 0x01;
PLL0FLT = 0x01;
PLL0MUL = 0x04;
for (loop=0; loop<256; loop );
PLL0CN |= 0x02;
while(!(PLL0CN & 0x10));
CLKSEL = 0x02;
SFRPAGE = SFRPAGE_SAVE;
}
/*Init*/
void Init()
{
//Конфигурирование таймеров
SFRPAGE = TIMER01_PAGE;
TCON = 0x51;
TMOD = 0x11;
CKCON = 0x18;
SFRPAGE = TMR3_PAGE;
TMR3CN = 0x04;
TMR3CF = 0x08;
RCAP3 = -SYSCLK/SAMPLE_RATE;
TMR3 = RCAP3;
EIE2 &= ~0x01;
TR3 = 1;
//запускаем на втором таймере Uart
SFRPAGE = TMR2_PAGE;
TMR2CF = 0x08; // Timer 2 Configuration
RCAP2 = - ((long) SYSCLK/BAUDRATEU0/16);
TMR2L = 0x00; // Timer 2 Low Byte
TMR2H = 0x00; // Timer 2 High Byte
TMR2CN = 0x04; // Timer 2 CONTROL
TR2 = 1;
SFRPAGE = UART0_PAGE;
SCON0 = 0x50;
SSTA0 = 0x05;
ES0 = 1;
//конфигурируем ADC(АЦП)
SFRPAGE = ADC0_PAGE;
AMX0SL = 0x01;
ADC0CN = 0x80;
SFRPAGE = ADC0_PAGE;
ADC0CN = 0x04;
REF0CN = 0x07;
AMX0CF = 0x00;
AMX0SL = 0x01;
ADC0CF = (SYSCLK/SAR_CLK) << 3;
ADC0CF |= 0x00; // Коэффициент усилителя PGA gain => 00 = 1 (default), 01 =2, 02 = 4, 03 = 8
EIE2 |= 0x02; // enable ADC interrupts
SFRPAGE = ADC0_PAGE;
ADC0CN = 0x84;
//Конфигурируем ножки контроллера
SFRPAGE = CONFIG_PAGE;
P0MDOUT = 0xFF;
P1MDOUT = 0xFF;
P2MDOUT = 0xFF;
P3MDOUT = 0xFF;*/
XBR0 = 0x44;
XBR1 = 0x04;
XBR2 = 0x40;
//Запускаем конфигурирование частоты
OSCILLATOR_Init();
//Конфигурируем прерывания
IE = 0x9B;
EIE2 |= 0x02;
//Расставляем приоритеты
IP = 0x13;
EIP2 = 0x02; //АЦП
}
Тут мы крутимся постоянно в бесконечном цикле, и отправляем полученные измерения АЦП
//-------------------------------------------------------------------
void main(void)
{
xdata unsigned int i=0, tmpint;
WDTCN = 0xde; //Останавливаем сторожевой таймер, чтобы контроллер не перезагружался
WDTCN = 0xad; // если есть желание, то можно контролировать с помощью него зависла программа или нет, и ребутнуть в аварийном режиме
EA=0; //отключаем все прерывания перед инициализацией
Init(); //проводим инициализацию
i = 0;
while(i < BUFADCSIZE)
{
BufADC[i]=0;
}
EA=1;
while(1)
{
if(RTC>(7*FREQT0))
{
IE0=1;
}
if(ProcessFlag == 1)
{
ADCFlag = 0;
flFree = 0;
EIE2 &= ~0x02; //АЦП выкл
//запускаем отправку по ком порту
tmpint = ADCcount;
ADCcount = 1;
while(ADCcount < tmpint)
{
//Write to UART0--------------------------------------
BufferInModem[0] = 40 | 0x40;
BufferInModem[0] &= ~0x80;
OutModem2((int)Propeller, 1);
OutModem2((int)ADCcount, 3);
OutModem2((int)BufADC[ADCcount ],5);
OutModem2((int)tmpint, 7);
r0 = 0;
rk = 9;
BufferInModem[rk] = 0;
for (i = r0; i < rk; i )
BufferInModem[rk] = BufferInModem[rk] ^ BufferInModem[i];
BufferInModem[rk] = BufferInModem[rk] | 0x80;
rk ;
flTransmiter = 1;
SFRPAGE = 0x00;
TI0 = 1;
RTC=0;
while(flTransmiter)
{
if(RTC>(RESETTICK))
{
RTC=0;
break;
}
}
RTC=0;
LED=0;
}
i = 0;
while(i < BUFADCSIZE)
{
BufADC[i]=0;
}
ADCcount = 0;
ProcessFlag = 0;
flFree = 1;
}
}
}
Создаем событие для прерывания с ножки, на которую подключен датчик холла
Чтобы точно знать сколько прошло времени, мы запускаем таймер, и считаем в нем время
Все данные снимаемые с АЦП записываем в буфер, чтобы потом передать всю пачку за один оборот. Такой способ позволил не тратить время на передачу во время снятия информации, как следствие шустрее работает и снимает больше точек.
Для того, чтобы как-то отделить нужные отклонения, на настольном приложении я решил применить преобразование Фурье, которое я до этого использовал для обработки картинок, немного поколдовав с бубном, получилось выделить нужные частоты.
Для разработки интерфейса я использовал C Builder 6.0
//---------------------------------------------------------------------------
#include <vcl.h>
#pragma hdrstop
#include "balansCom4.h"
#include <windows.h>
#include <vector.h>
#include "fstream.h"
#include "math.h"
//---------------------------------------------------------------------------
#define assert(ignore)((void)0)
#define BUFSIZE 4096
//---------------------------------------------------------------------------
#pragma package(smart_init)
#pragma link "CPort"
#pragma link "PERFGRAP"
#pragma resource "*.dfm"
TForm1 *Form1;
int N=1024,k=10;
ShortComplex arr[4096];
double Amp_F[4096];
double Phase_F[4096];
double Amp_max=0, Phase_max=0;
float r=0,rmax=0, fi=0, xx=0, yy=0;
float K_flt = 0.00005;
float Krmax = 0.05;
float kAmp = 0.1;
float a=1, b=0;
//---------------------------------------------------------------------------
bool perekl=false;
struct hComException{};
String tmptxt;
float RadMass[365], RadMassMax, j_max;
int fiMax, WACHDOG;
long data_i=0;
long bad = 0;
int V, Xlast, A, Alast, Vlast;
#define COM "Com5"
#define BodRate CBR_57600
#define TIMEOUT 3000
//---------------------------------------------------------------------------
Для выделения из полученного сигнала нужной частоты, очень полезным оказалось прямое и обратное преобразование Фурье. Данные льются непрерывным потоком, и чтобы успевать их обрабатывать, я применил оптимизированную версию, так называемую FFT. это не панацея, и для обработки видео потока лучше распаралеливать и использовать GPU, но для данной задачи, вполне применимо.
static unsigned char reverse256[]= {
0x00, 0x80, 0x40, 0xC0, 0x20, 0xA0, 0x60, 0xE0,
0x10, 0x90, 0x50, 0xD0, 0x30, 0xB0, 0x70, 0xF0,
0x08, 0x88, 0x48, 0xC8, 0x28, 0xA8, 0x68, 0xE8,
0x18, 0x98, 0x58, 0xD8, 0x38, 0xB8, 0x78, 0xF8,
0x04, 0x84, 0x44, 0xC4, 0x24, 0xA4, 0x64, 0xE4,
0x14, 0x94, 0x54, 0xD4, 0x34, 0xB4, 0x74, 0xF4,
0x0C, 0x8C, 0x4C, 0xCC, 0x2C, 0xAC, 0x6C, 0xEC,
0x1C, 0x9C, 0x5C, 0xDC, 0x3C, 0xBC, 0x7C, 0xFC,
0x02, 0x82, 0x42, 0xC2, 0x22, 0xA2, 0x62, 0xE2,
0x12, 0x92, 0x52, 0xD2, 0x32, 0xB2, 0x72, 0xF2,
0x0A, 0x8A, 0x4A, 0xCA, 0x2A, 0xAA, 0x6A, 0xEA,
0x1A, 0x9A, 0x5A, 0xDA, 0x3A, 0xBA, 0x7A, 0xFA,
0x06, 0x86, 0x46, 0xC6, 0x26, 0xA6, 0x66, 0xE6,
0x16, 0x96, 0x56, 0xD6, 0x36, 0xB6, 0x76, 0xF6,
0x0E, 0x8E, 0x4E, 0xCE, 0x2E, 0xAE, 0x6E, 0xEE,
0x1E, 0x9E, 0x5E, 0xDE, 0x3E, 0xBE, 0x7E, 0xFE,
0x01, 0x81, 0x41, 0xC1, 0x21, 0xA1, 0x61, 0xE1,
0x11, 0x91, 0x51, 0xD1, 0x31, 0xB1, 0x71, 0xF1,
0x09, 0x89, 0x49, 0xC9, 0x29, 0xA9, 0x69, 0xE9,
0x19, 0x99, 0x59, 0xD9, 0x39, 0xB9, 0x79, 0xF9,
0x05, 0x85, 0x45, 0xC5, 0x25, 0xA5, 0x65, 0xE5,
0x15, 0x95, 0x55, 0xD5, 0x35, 0xB5, 0x75, 0xF5,
0x0D, 0x8D, 0x4D, 0xCD, 0x2D, 0xAD, 0x6D, 0xED,
0x1D, 0x9D, 0x5D, 0xDD, 0x3D, 0xBD, 0x7D, 0xFD,
0x03, 0x83, 0x43, 0xC3, 0x23, 0xA3, 0x63, 0xE3,
0x13, 0x93, 0x53, 0xD3, 0x33, 0xB3, 0x73, 0xF3,
0x0B, 0x8B, 0x4B, 0xCB, 0x2B, 0xAB, 0x6B, 0xEB,
0x1B, 0x9B, 0x5B, 0xDB, 0x3B, 0xBB, 0x7B, 0xFB,
0x07, 0x87, 0x47, 0xC7, 0x27, 0xA7, 0x67, 0xE7,
0x17, 0x97, 0x57, 0xD7, 0x37, 0xB7, 0x77, 0xF7,
0x0F, 0x8F, 0x4F, 0xCF, 0x2F, 0xAF, 0x6F, 0xEF,
0x1F, 0x9F, 0x5F, 0xDF, 0x3F, 0xBF, 0x7F, 0xFF,
};
static long double temp;
inline void operator =(ShortComplex &x, const Complex &y) { x.re = (double)y.re; x.im = (double)y.im; }
inline void operator-=(ShortComplex &x, const Complex &y) { x.re -= (double)y.re; x.im -= (double)y.im; }
inline void operator*=(Complex &x, const Complex &y) { temp = x.re; x.re = temp * y.re - x.im * y.im; x.im = temp * y.im x.im * y.re; }
inline void operator*=(Complex &x, const ShortComplex &y) { temp = x.re; x.re = temp * y.re - x.im * y.im; x.im = temp * y.im x.im * y.re; }
inline void operator/=(ShortComplex &x, double div) { x.re /= div; x.im /= div; }
//array exp(-2*pi*j/2^n) for n= 1,...,32
//exp(-2*pi*j/2^n) = Complex( cos(2*pi/2^n), -sin(2*pi/2^n) )
static Complex W2n[32]={
{-1.00000000000000000000000000000000, 0.00000000000000000000000000000000}, // W2 calculator (copy/paste) : po, ps
{ 0.00000000000000000000000000000000, -1.00000000000000000000000000000000}, // W4: p/2=o, p/2=s
{ 0.70710678118654752440084436210485, -0.70710678118654752440084436210485}, // W8: p/4=o, p/4=s
{ 0.92387953251128675612818318939679, -0.38268343236508977172845998403040}, // p/8=o, p/8=s
{ 0.98078528040323044912618223613424, -0.19509032202212826784828486847702}, // p/16=
{ 0.99518472667219688624483695310948, -9.80171403295606019941955638886e-2}, // p/32=
{ 0.99879545620517239271477160475910, -4.90676743274180142549549769426e-2}, // p/64=
{ 0.99969881869620422022576564966617, -2.45412285229122880317345294592e-2}, // p/128=
{ 0.99992470183914454092164649119638, -1.22715382857199260794082619510e-2}, // p/256=
{ 0.99998117528260114265699043772857, -6.13588464915447535964023459037e-3}, // p/(2y9)=
{ 0.99999529380957617151158012570012, -3.06795676296597627014536549091e-3}, // p/(2y10)=
{ 0.99999882345170190992902571017153, -1.53398018628476561230369715026e-3}, // p/(2y11)=
{ 0.99999970586288221916022821773877, -7.66990318742704526938568357948e-4}, // p/(2y12)=
{ 0.99999992646571785114473148070739, -3.83495187571395589072461681181e-4}, // p/(2y13)=
{ 0.99999998161642929380834691540291, -1.91747597310703307439909561989e-4}, // p/(2y14)=
{ 0.99999999540410731289097193313961, -9.58737990959773458705172109764e-5}, // p/(2y15)=
{ 0.99999999885102682756267330779455, -4.79368996030668845490039904946e-5}, // p/(2y16)=
{ 0.99999999971275670684941397221864, -2.39684498084182187291865771650e-5}, // p/(2y17)=
{ 0.99999999992818917670977509588385, -1.19842249050697064215215615969e-5}, // p/(2y18)=
{ 0.99999999998204729417728262414778, -5.99211245264242784287971180889e-6}, // p/(2y19)=
{ 0.99999999999551182354431058417300, -2.99605622633466075045481280835e-6}, // p/(2y20)=
{ 0.99999999999887795588607701655175, -1.49802811316901122885427884615e-6}, // p/(2y21)=
{ 0.99999999999971948897151921479472, -7.49014056584715721130498566730e-7}, // p/(2y22)=
{ 0.99999999999992987224287980123973, -3.74507028292384123903169179084e-7}, // p/(2y23)=
{ 0.99999999999998246806071995015625, -1.87253514146195344868824576593e-7}, // p/(2y24)=
{ 0.99999999999999561701517998752946, -9.36267570730980827990672866808e-8}, // p/(2y25)=
{ 0.99999999999999890425379499688176, -4.68133785365490926951155181385e-8}, // p/(2y26)=
{ 0.99999999999999972606344874922040, -2.34066892682745527595054934190e-8}, // p/(2y27)=
{ 0.99999999999999993151586218730510, -1.17033446341372771812462135032e-8}, // p/(2y28)=
{ 0.99999999999999998287896554682627, -5.85167231706863869080979010083e-9}, // p/(2y29)=
{ 0.99999999999999999571974138670657, -2.92583615853431935792823046906e-9}, // p/(2y30)=
{ 0.99999999999999999892993534667664, -1.46291807926715968052953216186e-9}, // p/(2y31)=
};
void fft(ShortComplex *x, int T, bool complement)
{
unsigned int I, J, Nmax, N, Nd2, k, m, mpNd2, Skew;
unsigned char *Ic = (unsigned char*) &I;
unsigned char *Jc = (unsigned char*) &J;
ShortComplex S;
ShortComplex *Wstore, *Warray;
Complex WN, W, Temp, *pWN;
Nmax = 1 << T;
//first interchanging
for(I = 1; I < Nmax - 1; I )
{
Jc[0] = reverse256[Ic[3]];
Jc[1] = reverse256[Ic[2]];
Jc[2] = reverse256[Ic[1]];
Jc[3] = reverse256[Ic[0]];
J >>= (32 - T);
if (I < J)
{
S = x[I];
x[I] = x[J];
x[J] = S;
}
}
//rotation multiplier array allocation
Wstore = new ShortComplex[Nmax / 2];
Wstore[0].re = 1.0;
Wstore[0].im = 0.0;
//main loop
for(N = 2, Nd2 = 1, pWN = W2n, Skew = Nmax >> 1; N <= Nmax; Nd2 = N, N = N, pWN , Skew >>= 1)
{
//WN = W(1, N) = exp(-2*pi*j/N)
WN= *pWN;
if (complement)
WN.im = -WN.im;
for(Warray = Wstore, k = 0; k < Nd2; k , Warray = Skew)
{
if (k & 1)
{
W *= WN;
*Warray = W;
}
else
W = *Warray;
for(m = k; m < Nmax; m = N)
{
mpNd2 = m Nd2;
Temp = W;
Temp *= x[mpNd2];
x[mpNd2] = x[m];
x[mpNd2] -= Temp;
x[m] = Temp;
}
}
}
delete [] Wstore;
if (complement)
{
for( I = 0; I < Nmax; I )
x[I] /= Nmax;
}
}
Готовим GUI, и настраиваем COM порт для приема.
__fastcall TForm1::TForm1(TComponent* Owner)
: TForm(Owner)
{
for(int i=0; i<362; i )
RadMass[i]=0;
RadMassMax=0;
Image1->Canvas->Rectangle(0,0,Image1->Width, Image1->Height);
int i=0;
float r, fi=0;
float xx, yy;
while(i<100)
{
Image1->Canvas->Pen->Color=clGreen;
i=i 10;
r=i;
fi=0;
while(fi<360)
{
fi=fi 1;
xx = r*cos(fi) Image1->Width/2;
yy = r*sin(fi) Image1->Height/2;
Image1->Canvas->Ellipse((int)xx,(int)yy, (int)xx 2,(int)yy 2);
}
}
Image1->Canvas->Pen->Color=clBlack;
Button2Click(Owner);
flEdit=0;
hCom = CreateFile(COM,GENERIC_READ | GENERIC_WRITE,0,NULL, OPEN_EXISTING, FILE_FLAG_OVERLAPPED, NULL);
if( hCom == INVALID_HANDLE_VALUE )
{
ShowMessage("Com port error");
CloseHandle(hCom);
Stat->SimpleText="Com port error";
}
else
{
SetCommMask(hCom, EV_RXCHAR);
SetupComm(hCom, 1500, 1500);
CommTimeOuts.ReadIntervalTimeout = MAXDWORD;
CommTimeOuts.ReadTotalTimeoutMultiplier = TIMEOUT;
CommTimeOuts.ReadTotalTimeoutConstant = TIMEOUT;
CommTimeOuts.WriteTotalTimeoutMultiplier = TIMEOUT;
CommTimeOuts.WriteTotalTimeoutConstant = TIMEOUT;
if(!SetCommTimeouts(hCom, &CommTimeOuts))
{
hCom = 0;
throw hComException();
}
memset(&dcb, 0, sizeof(dcb));
dcb.DCBlength = sizeof(DCB);
GetCommState(hCom, &dcb);
dcb.BaudRate = BodRate;
dcb.fParity = 0;
dcb.ByteSize = 8;
dcb.Parity = NOPARITY;
dcb.StopBits = ONESTOPBIT;
dcb.fAbortOnError = FALSE;
dcb.fDtrControl = DTR_CONTROL_DISABLE;
dcb.fRtsControl = RTS_CONTROL_DISABLE;
dcb.fBinary = TRUE;
dcb.fParity = FALSE;
dcb.fInX = FALSE;
dcb.fOutX = FALSE;
dcb.XonChar = 0;
dcb.XoffChar = (unsigned char)0xFF;
dcb.fErrorChar = FALSE;
dcb.fNull = FALSE;
dcb.fOutxCtsFlow = FALSE;
dcb.fOutxDsrFlow = FALSE;
dcb.XonLim = 128;
dcb.XoffLim = 128;
SetCommState(hCom,&dcb);
PurgeComm(hCom, PURGE_RXCLEAR);
begin = GetTickCount();
tmptxt = COM;
tmptxt = " br";
tmptxt = dcb.BaudRate;
tmptxt = " p";
tmptxt = dcb.Parity;
tmptxt = " By";
tmptxt = dcb.ByteSize;
tmptxt = " sb";
tmptxt = dcb.StopBits;
Stat->SimpleText= tmptxt;
overlapped.hEvent = CreateEvent(NULL, true, true, NULL);
}
}
void __fastcall TForm1::FormClose(TObject *Sender, TCloseAction &Action)
{
CloseHandle(hCom);
}
Решил приделать функции сохранения и загрузки, чтобы можно было как-то поднимать данные при необходимости, хотя совершенно необязательно для стенда. Данные хоть и сохранялись, в будущем никогда не использовались, поэтому можно не делать.
void TForm1::SaveToFile(String FileName)
{
fstream file_;
file_.open(FileName.c_str(), ios::out);
if (!file_)
{
file_.close();
return;
}
int count_ = 0, tmp_count;
tmp_count = Series1->XValues->MaxValue-1;
if(tmp_count>(Series2->XValues->MaxValue-1))
tmp_count = Series2->XValues->MaxValue-1;
if(tmp_count>(Series6->XValues->MaxValue-1))
tmp_count = Series6->XValues->MaxValue-1;
while(count_ < tmp_count)
{
int a1Propeller = Series1->YValue[count_];
int a2X1 = Series2->YValue[count_];
int a6Ugol = Series6->YValue[count_];
file_ << a1Propeller << " " << a2X1 << " " << a6Ugol << " " ;
}
file_.close();
}
void TForm1::LoadFromFile(String FileName)
{
fstream file;
file.open(FileName.c_str());
if (!file)
{
file.close();
return;
}
float a1Propeller = 0, a2X1 = 0, a6Ugol = 0;
Series1->Clear();
Series2->Clear();
Series6->Clear();
long file_i=0;
file_i=0;
while(!file.eof())
{
file >> a1Propeller >> a2X1 >> a6Ugol;
Application->ProcessMessages();
Series1->Add(a1Propeller);
Series2->Add(a2X1);
Series6->Add(a6Ugol);
Dannye->Cells[0][0]="Propeller";
Dannye->Cells[1][0]=a1Propeller;
Dannye->Cells[0][1]="X1";
Dannye->Cells[1][1]=a2X1;
float r, fi, xx, yy;
r = (Image1->Height/2)*(a*a2X1-b)/4095;
fi = a6Ugol;
RadMass[(int)fi]=RadMass[(int)fi] (r-RadMass[(int)fi])*Krmax;
if(RadMass[(int)fi]>RadMassMax)
{
float lastRadMax;
int lastfiMax;
lastfiMax = fiMax;
lastRadMax = RadMass[lastfiMax];
Image1->Canvas->Pen->Color=clWhite;
Image1->Canvas->MoveTo(Image1->Width/2, Image1->Height/2);
xx= lastRadMax*cos(lastfiMax) Image1->Width/2;
yy= lastRadMax*sin(lastfiMax) Image1->Height/2;
Image1->Canvas->LineTo(xx, yy);
Image1->Canvas->MoveTo(xx, yy 1);
Image1->Canvas->LineTo(Image1->Width/2, Image1->Height/2 1);
Image1->Canvas->MoveTo(xx, yy-1);
Image1->Canvas->LineTo(Image1->Width/2, Image1->Height/2-1);
Image1->Canvas->MoveTo(xx 1, yy);
Image1->Canvas->LineTo(Image1->Width/2 1, Image1->Height/2);
Image1->Canvas->MoveTo(xx-1, yy);
Image1->Canvas->LineTo(Image1->Width/2-1, Image1->Height/2);
RadMassMax = RadMass[(int)fi];
fiMax = fi;
lastRadMax = RadMassMax;
lastfiMax = fiMax;
Image1->Canvas->Pen->Color=clRed;
Image1->Canvas->MoveTo(Image1->Width/2, Image1->Height/2);
xx= RadMassMax*cos(2*M_PI*fiMax/360) Image1->Width/2;
yy= RadMassMax*sin(2*M_PI*fiMax/360) Image1->Height/2;
Image1->Canvas->LineTo(xx, yy);
Image1->Canvas->MoveTo(xx, yy 1);
Image1->Canvas->LineTo(Image1->Width/2, Image1->Height/2 1);
Image1->Canvas->MoveTo(xx, yy-1);
Image1->Canvas->LineTo(Image1->Width/2, Image1->Height/2-1);
Image1->Canvas->MoveTo(xx 1, yy);
Image1->Canvas->LineTo(Image1->Width/2 1, Image1->Height/2);
Image1->Canvas->MoveTo(xx-1, yy);
Image1->Canvas->LineTo(Image1->Width/2-1, Image1->Height/2);
Image1->Canvas->Pen->Color=clBlack;
Dannye->Cells[0][3]="Дисбаланс";
Dannye->Cells[1][3]= (int)RadMassMax;
}
xx = r*cos(2*M_PI*fi/360) Image1->Width/2;
yy = r*sin(2*M_PI*fi/360) Image1->Height/2;
Image1->Canvas->Ellipse((int)xx,(int)yy, (int)xx 2,(int)yy 2);
if (file_i > (N 1))
{
int count_= 0;
while(count_ < N)
{
arr[count_].re= Series2->YValue[count_ file_i-N];
arr[count_ ].im= 0.0;
}
Series7->Clear();
Series8->Clear();
fft(arr, k, false);
int i=0;
double nSamplesPerSec;
int Nmax= (N 1) / 2;
double *freq= new double[Nmax];
double *amp= new double[Nmax];
double *phase= new double[Nmax];
int j= 0;
double limit= 0.001;
double abs2min= limit * limit * N * N;
double abs2max= 10E150;
if (arr[i].re >= limit)
{
amp[j]= arr[i].re / N;
freq[j]= 0.0;
phase[j]= 0.0;
j;
}
i;
for(i= 1; i < Nmax; i)
{
double re= arr[i].re;
double im= arr[i].im;
long double abs2;
abs2 = re * re im * im;
if (abs2 < abs2min)
continue;
if (abs2 > abs2max)
abs2=abs2max;
amp[j]= 2.0 * sqrt((double)abs2) / N;
Amp_F[j] = Amp_F[j] (amp[j]-Amp_F[j])*K_flt;
Series7->Add(Amp_F[j]);
phase[j]= atan2(im, re);
phase[j] = M_PI_2;
if (phase[j] > M_PI)
phase[j]-= 2*M_PI;
phase[j]= phase[j] * M_PI / 180.0;
Phase_F[j] = Phase_F[j] (phase[j] - Phase_F[j])*K_flt;
Series8->Add(Phase_F[j]);
freq[j]= (nSamplesPerSec * i) / N;
j;
}
delete[] amp;
delete[] freq;
delete[] phase;
}
file_i ;
}
file.close();
return;
}
//---------------------------------------------------------------------------
void __fastcall TForm1::Button1Click(TObject *Sender)
{
String FileName_;
FileName_ = ExtractFilePath(Application->ExeName);
FileName_ = "Data\";
FileName_ = FormatDateTime("dd_mmm_yyy'-'hh_nn'",Now());
SaveDialog1->FileName = FileName_;
if(SaveDialog1->Execute())
{
SaveToFile(SaveDialog1->FileName);
flEdit=0;
}
}
//---------------------------------------------------------------------------
void __fastcall TForm1::Button3Click(TObject *Sender)
{
if(OpenDialog1->Execute())
{
LoadFromFile(OpenDialog1->FileName);
}
}
Чтобы прием и расшифровка буфера происходила автоматически, я сделал возможность делать это по таймеру, не совсем удачная идея, сейчас бы я сделал по другому, я бы собирал данные по приходу в отдельном потоке, и передавал на вывод, чтобы не мешать интерфейсу ввода и другим приложениям. Однако и такой вариант оказался жизнеспособным, и со своей задачей справился вполне успешно.
void __fastcall TForm1::Timer1Timer(TObject *Sender)
{
if(CheckBox1->Checked)
{
flEdit=1;
int Propeller, X1, ADCcount, ADCcountMax, Amax;
unsigned char tmp40;
int attempts = 3, nLetter40 = 11;
int rBUF=0, wBUF=0, marBUF=0;
feedback = 0;
BYTE data1[BUFSIZE];
vector<unsigned char> data(data1, data1 BUFSIZE);
unsigned char* buf = &data[0];
ADCcountMax=0;
WaitCommEvent(hCom, &mask, &overlapped);
signal = WaitForSingleObject(overlapped.hEvent, 7000);
if(signal == WAIT_OBJECT_0)
{
if(GetOverlappedResult(hCom, &overlapped, &feedback, true))
if((mask & EV_RXCHAR)!=0)
{
ClearCommError(hCom, &feedback, &comstat);
btr = comstat.cbInQue;
if(btr)
{
ReadFile(hCom, buf, btr, &feedback, &overlapped);
wBUF =btr;//(DWORD)data.size();
if(wBUF >= BUFSIZE)
{
wBUF = 0;
marBUF = 1;
}
}
while(rBUF < (wBUF (marBUF*BUFSIZE)))
{
unsigned char tmpBuf = data[rBUF];
tmpBuf = tmpBuf&~0x80;
if(tmpBuf==(0x40 | 40))
{
nLetter40=0;
tmp40 = 0;
tmp40 = tmp40 ^ data[rBUF];
}
else if(nLetter40==0 && (data[rBUF]>>7)==1)
{
nLetter40 ;
Propeller = data[rBUF]&~0x80;
tmp40 = tmp40 ^ data[rBUF];
}
else if(nLetter40==1 && (data[rBUF]>>7)==1)
{
nLetter40 ;
Propeller |= ((int)(data[rBUF]&~0x80)<<7);
tmp40 = tmp40 ^ data[rBUF];
}
else if(nLetter40==2 && (data[rBUF]>>7)==1)
{
nLetter40 ;
ADCcount = data[rBUF]&~0x80;
tmp40 = tmp40 ^ data[rBUF];
}
else if(nLetter40==3 && (data[rBUF]>>7)==1)
{
nLetter40 ;
ADCcount |= ((int)(data[rBUF]&~0x80)<<7);
tmp40 = tmp40 ^ data[rBUF];
}
else if(nLetter40==4 && (data[rBUF]>>7)==1)
{
nLetter40 ;
X1 = data[rBUF]&~0x80;
tmp40 = tmp40 ^ data[rBUF];
}
else if(nLetter40==5 && (data[rBUF]>>7)==1)
{
nLetter40 ;
X1 |= ((int)(data[rBUF]&~0x80)<<7);
tmp40 = tmp40 ^ data[rBUF];
}
else if(nLetter40==6 && (data[rBUF]>>7)==1)
{
nLetter40 ;
Amax = data[rBUF]&~0x80;
tmp40 = tmp40 ^ data[rBUF];
}
else if(nLetter40==7 && (data[rBUF]>>7)==1)
{
nLetter40 ;
Amax |= ((int)(data[rBUF]&~0x80)<<7);
tmp40 = tmp40 ^ data[rBUF ];
tmp40 = tmp40 | 0x80;
float Angle=400;
if(Amax>0)
Angle = 360*ADCcount/Amax;
if(tmp40 != 0x80 && tmp40 == data[rBUF]
&& ADCcount>0 && X1<4096 && X1>0 && Amax>0
&& Propeller<1000 && Propeller>100 && Angle>=0
&& Angle<=360)
{
//Chart1->BottomAxis->Scroll(1, false);
Dannye->Cells[0][0]="Обороты";
Dannye->Cells[1][0]=Propeller;
Series1->Add(Propeller);
Dannye->Cells[0][1]="X1";
Dannye->Cells[1][1]=X1;
V=Xlast-X1;
A=Vlast-V;
Vlast=V;
Alast=A;
Series2->Add(X1);
Series6->Add(360*ADCcount/Amax);
if (data_i > (N 1))
{
int count_= 0;
while(count_ < N)
{
arr[count_].re= Series2->YValue[count_ data_i-N];
arr[count_ ].im= 0.0;
}
Series7->Clear();
Series8->Clear();
fft(arr, k, false);
int i=0;
double nSamplesPerSec;
int Nmax= (N 1) / 2;
double *freq= new double[Nmax];
double *amp= new double[Nmax];
double *phase= new double[Nmax];
int j= 0;
double limit= 0.001;
double abs2min= limit * limit * N * N;
double abs2max= 10E150;
if (arr[i].re >= limit)
{
amp[j]= arr[i].re / N;
freq[j]= 0.0;
phase[j]= 0.0;
j;
}
i;
for(i= 1; i < Nmax; i)
{
double re= arr[i].re;
double im= arr[i].im;
long double abs2;
abs2 = re * re im * im;
if (abs2 < abs2min)
continue;
if (abs2 > abs2max)
abs2=abs2max;
amp[j]= 2.0 * sqrt((double)abs2) / N;
//Series7->Add(amp[j]);
Amp_F[j] = Amp_F[j] (amp[j]-Amp_F[j])*K_flt;
Series7->Add(Amp_F[j]);
phase[j]= atan2(im, re);
phase[j] = M_PI_2;
if (phase[j] > M_PI)
phase[j]-= 2*M_PI;
phase[j]= phase[j] * M_PI / 180.0;
//Series8->Add(phase[j]);
Phase_F[j] = Phase_F[j] (phase[j] - Phase_F[j])*K_flt;
Series8->Add(Phase_F[j]);
freq[j]= (nSamplesPerSec * i) / N;
j;
}
delete[] amp;
delete[] freq;
delete[] phase;
for(i= 0; i<Nmax; i )
{
if(i>(j_max 1))
arr[i].re = 0;
arr[i].im = 0;
}
fft(arr, k, true);
/*
count_= 0;
while(count_ < N)
{
Series4->Add(arr[count_ ].re);
} */
Series4->Add(arr[(N-1)].re);
float r, fi, xx, yy;
r = (Image1->Height/2)*(a*arr[(N-1)].re-b)/4095;
//X1=arr[1023].re; ///!!!!!!!!!!
fi = 360*(ADCcount)/Amax;
xx= r*cos(2*M_PI*fi/360) Image1->Width/2;
yy= r*sin(2*M_PI*fi/360) Image1->Height/2;
Image1->Canvas->Pen->Color = clYellow;
Image1->Canvas->Ellipse((int)xx,(int)yy, (int)xx 2,(int)yy 2);
}
else
{
Series4->Add(X1);
}
Image1->Canvas->Pen->Color = clBlack;
data_i ;
Dannye->Cells[0][2]="Измерений на круг";
Dannye->Cells[1][2]=Amax;
float r, fi, xx, yy;
r = (Image1->Height/2)*(a*X1-b)/4095;
fi = 360*(ADCcount)/Amax;
if(X1>0 && X1<4095 && fi<361 && fi >0)
{
//Черные точки
xx = r*cos(2*M_PI*fi/360) Image1->Width/2;
yy = r*sin(2*M_PI*fi/360) Image1->Height/2;
Image1->Canvas->Ellipse((int)xx,(int)yy, (int)xx 2,(int)yy 2);
X1=arr[(N-1)].re; ///!!!!!!!!!!
r = (Image1->Height/2)*(a*X1-b)/4095;
RadMass[(int)fi]=RadMass[(int)fi] (r-RadMass[(int)fi])*Krmax;
//Красные точки
xx= RadMass[(int)fi]*cos(2*M_PI*fi/360) Image1->Width/2;
yy= RadMass[(int)fi]*sin(2*M_PI*fi/360) Image1->Height/2;
Image1->Canvas->Pen->Color = clYellow;
Image1->Canvas->Ellipse((int)xx,(int)yy, (int)xx 2,(int)yy 2);
Image1->Canvas->Pen->Color = clBlack;
if(RadMass[(int)fi]>RadMassMax)
{
Image1->Canvas->Pen->Color=clWhite;
Image1->Canvas->MoveTo(Image1->Width/2, Image1->Height/2);
xx= RadMassMax*cos(2*M_PI*fiMax/360) Image1->Width/2;
yy= RadMassMax*sin(2*M_PI*fiMax/360) Image1->Height/2;
Image1->Canvas->LineTo(xx, yy);
Image1->Canvas->MoveTo(xx, yy 1);
Image1->Canvas->LineTo(Image1->Width/2, Image1->Height/2 1);
Image1->Canvas->MoveTo(xx, yy-1);
Image1->Canvas->LineTo(Image1->Width/2, Image1->Height/2-1);
Image1->Canvas->MoveTo(xx 1, yy);
Image1->Canvas->LineTo(Image1->Width/2 1, Image1->Height/2);
Image1->Canvas->MoveTo(xx-1, yy);
Image1->Canvas->LineTo(Image1->Width/2-1, Image1->Height/2);
RadMassMax = RadMass[(int)fi];
fiMax = (int)fi;
Image1->Canvas->Pen->Color=clRed;
Image1->Canvas->MoveTo(Image1->Width/2, Image1->Height/2);
xx= RadMassMax*cos(2*M_PI*fiMax/360) Image1->Width/2;
yy= RadMassMax*sin(2*M_PI*fiMax/360) Image1->Height/2;
Image1->Canvas->LineTo(xx, yy);
Image1->Canvas->MoveTo(xx, yy 1);
Image1->Canvas->LineTo(Image1->Width/2, Image1->Height/2 1);
Image1->Canvas->MoveTo(xx, yy-1);
Image1->Canvas->LineTo(Image1->Width/2, Image1->Height/2-1);
Image1->Canvas->MoveTo(xx 1, yy);
Image1->Canvas->LineTo(Image1->Width/2 1, Image1->Height/2);
Image1->Canvas->MoveTo(xx-1, yy);
Image1->Canvas->LineTo(Image1->Width/2-1, Image1->Height/2);
Image1->Canvas->Pen->Color=clBlack;
Dannye->Cells[0][6]="Дисбаланс";
Dannye->Cells[1][6]= (int)RadMassMax;
Dannye->Cells[0][7] ="Угол";
Dannye->Cells[1][7] =(int)fiMax;
}
RadMassMax = RadMass[(int)fiMax];
}
}
else
{
bad ;
}
String tmp_txt;
if(Amax>0)
j_max = (int)((float)N/(float)Amax);
Amp_max = Amp_max ((Amp_F[(int)j_max] Amp_F[(int)j_max-1] Amp_F[(int)j_max 1])/3. - Amp_max)*kAmp;
Phase_max = Phase_F[(int)j_max];
Dannye->Cells[0][3]="Амплитуда";
Dannye->Cells[1][3]=(int)Amp_max;
Dannye->Cells[0][4]="Частота и Фаза";
tmp_txt = j_max;
tmp_txt = " |";
tmp_txt =Phase_max;
Dannye->Cells[1][4]=tmp_txt;
Dannye->Cells[0][5]="Ошибки приема";
if(data_i>0)
{
tmp_txt = (int)(100*bad/(data_i bad));
tmp_txt =" %";
}
else
{
tmp_txt = "100%";
}
Dannye->Cells[1][5]=tmp_txt.c_str();
}
if(rBUF >= BUFSIZE)
{
rBUF = 0;
marBUF = 0;
}
}
memset(buf, 0, BUFSIZE);
}
}
else
{
CheckBox1->Checked = false;
}
delete[] buf;
}
}
Чтобы можно было все очистить и начать заново, сделал кнопку очистить и функцию, которая зачищает и перерисовывает поле с накопленными данными.
void __fastcall TForm1::Button2Click(TObject *Sender)
{
Series1->Clear();
Series2->Clear();
Series3->Clear();
Series4->Clear();
Series5->Clear();
Series6->Clear();
Series7->Clear();
Series8->Clear();
r=0;
rmax=0;
fi=0;
xx=0;
yy=0;
data_i = 0; bad=0;
Image1->Canvas->Rectangle(0,0,Image1->Width, Image1->Height);
rmax = 0.3*sqrt(Image1->Width*Image1->Width Image1->Height*Image1->Height);
Image1->Canvas->Pen->Color=clBlue;
r = rmax;
while(fi<360)
{
if(fi>1)
{
Image1->Canvas->Pen->Color=clGreen;
}
xx = r*cos(2*M_PI*fi/360) Image1->Width/2;
yy = r*sin(2*M_PI*fi/360) Image1->Height/2;
Image1->Canvas->MoveTo(Image1->Width/2, Image1->Height/2);
Image1->Canvas->LineTo(xx, yy);
if(fi<=1){
Image1->Canvas->MoveTo(xx, yy 1);
Image1->Canvas->LineTo(Image1->Width/2, Image1->Height/2 1);
Image1->Canvas->MoveTo(xx, yy-1);
Image1->Canvas->LineTo(Image1->Width/2, Image1->Height/2-1);
Image1->Canvas->MoveTo(xx 1, yy);
Image1->Canvas->LineTo(Image1->Width/2 1, Image1->Height/2);
Image1->Canvas->MoveTo(xx-1, yy);
Image1->Canvas->LineTo(Image1->Width/2-1, Image1->Height/2);
}
fi=fi 30;
}
r=0;
do
{
r=r 15;
fi=0;
while(fi<360)
{
fi=fi 1;
xx = r*cos(2*M_PI*fi/360) Image1->Width/2;
yy = r*sin(2*M_PI*fi/360) Image1->Height/2;
Image1->Canvas->Ellipse((int)xx,(int)yy, (int)xx 2,(int)yy 2);
}
}while(r<rmax);
Image1->Canvas->Pen->Color=clRed;
fi=0;
while(fi<360)
{
fi=fi 1;
r=RadMass[(int)fi];
xx = r*cos(2*M_PI*fi/360) Image1->Width/2;
yy = r*sin(2*M_PI*fi/360) Image1->Height/2;
//Image1->Canvas->LineTo(xx, yy);
Image1->Canvas->Ellipse((int)xx,(int)yy, (int)xx 2,(int)yy 2);
}
Image1->Canvas->Pen->Color=clRed;
for(int i=0; i<4; i )
{
Image1->Canvas->MoveTo(Image1->Width/2 i, Image1->Height/2 i);
Image1->Canvas->LineTo(RadMassMax*cos(2*M_PI*fiMax/360) Image1->Width/2 i, RadMassMax*sin(2*M_PI*fiMax/360) Image1->Height/2 i);
}
for(int i=0; i<362; i )
RadMass[i]=0;
RadMassMax=0;
for(int i=0; i<4095; i )
{
Amp_F[i]=0;
Phase_F[i]=0;
arr[i].re=0;
arr[i].im=0;
}
Image1->Canvas->Pen->Color=clBlack;
}
Чтобы иметь возможность постепенно увеличивать чувствительность на графическом поле отклонения баланса, добавил переключатель чувствитльности.
В итоге получилась довольно удобная программка, которая показывает, в какую сторону существует дисбаланс, и приноровившись приклеивая кусочки аракала по 0,15г удалось достаточно точно отбалансировать винт.
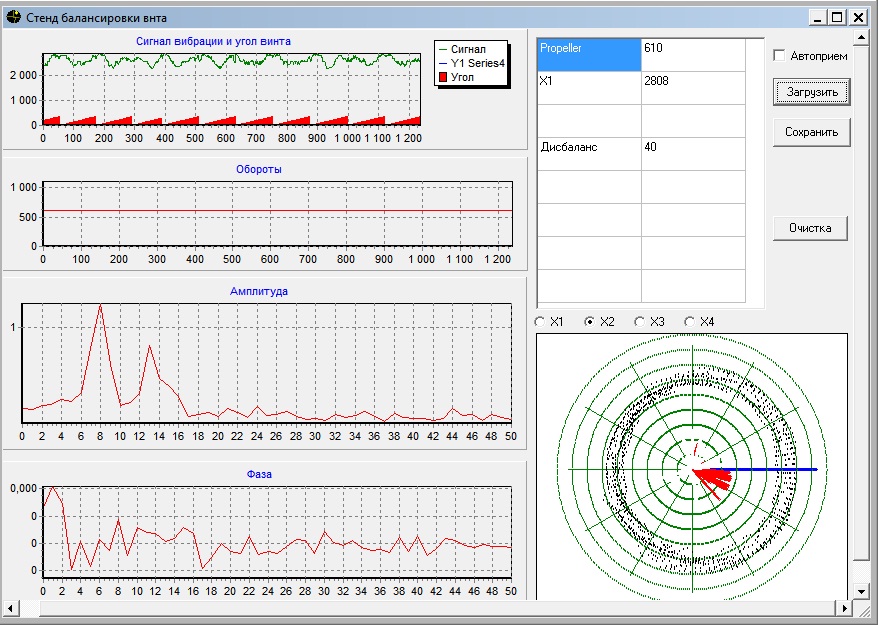
/Сама программка в работе/
Если посмотреть на пики по частотам, то можно заметить, что ярко выражены две амплитуды, как выяснилось одна отвечает за вибрацию винта, а вторая создается электромотором, так как он подключен через ремень и крутиться быстрее. Таким образом балансируя винт мы минимизируем первый пик, прикрепляя грузик соразмерный с отклонением круга, на противоположенную сторону.





 (1 оценок, среднее: 4,00 из 5)
(1 оценок, среднее: 4,00 из 5)